Image Sampling¶
Faisal Qureshi
Professor
Faculty of Science
Ontario Tech University
Oshawa ON Canada
http://vclab.science.ontariotechu.ca
Copyright information¶
© Faisal Qureshi
License¶

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
import numpy as np
import scipy as sp
from scipy import signal
import cv2 as cv
import matplotlib.pyplot as plt
import matplotlib as mpl
from matplotlib import cm
from matplotlib.ticker import LinearLocator, FormatStrFormatter
Lesson Plan¶
- Interpolation basics
- Image sampling
- Bilinear sampling
Interplation in 1D¶
# Example from https://docs.scipy.org/doc/scipy/reference/tutorial/interpolate.html
from scipy.interpolate import interp1d
x = np.linspace(0, 10, num=11, endpoint=True)
y = np.cos(-x**2/9.0)
plt.figure(figsize=(10,5))
plt.plot(x, y, 'ro')
plt.xlabel('x')
plt.ylabel('y');

# try kind = 'cubic', 'nearest', 'next', 'previous', 'quadratic'
f = interp1d(x, y, kind='cubic')
xnew = np.linspace(0, 10, num=181, endpoint=True)
plt.figure(figsize=(10,5))
plt.plot(x, y, 'ro', xnew, f(xnew), '-b')
plt.xlabel('x')
plt.ylabel('y');

Sampling in 2D¶
filename = 'data/van-gogh.jpg'
I = cv.imread(filename)
I = cv.cvtColor(I, cv.COLOR_BGR2RGB)
plt.figure(figsize=(6,6))
plt.xticks([])
plt.yticks([])
plt.title('{}'.format(filename))
plt.imshow(I);

Lets inspect the shape and data type of this image
print('Shape = {}'.format(I.shape))
print('Data type = {}'.format(I.dtype))
Shape = (512, 512, 3) Data type = uint8
Setting up destination image¶
Lets setup a destination image
h, w = 32, 32
dst = np.empty((h, w, 3), dtype=I.dtype)
Setting up sampling locations¶
Now set up sampling coordinates. locs is setup to map $(x,y)$ locations in the source image with corresponding pixel $(i,j)$ locations in the destination image.
y_src = np.linspace(0, I.shape[0], h)
x_src = np.linspace(0, I.shape[1], w)
yy_src, xx_src = np.meshgrid(y_src, x_src)
y_dst = np.arange(0, h)
x_dst = np.arange(0, w)
yy_dst, xx_dst = np.meshgrid(y_dst, x_dst)
locs = zip(yy_src.flatten(), xx_src.flatten(), yy_dst.flatten().astype('uint'), xx_dst.flatten().astype('uint'))
Performing sampling¶
The following function copies pixel color at location $(x,y)$ in the source image to pixel location $(i,j)$ in the destination image.
def sample(I, dst, locs):
for (y_src, x_src, y_dst, x_dst) in locs:
s = (x_src, y_src) # Notice the switch of x and y
dst[y_dst, x_dst] = cv.getRectSubPix(I, tuple((1,1)), tuple(s))[0,0]
sample(I, dst, locs)
plt.figure(figsize=(5,5))
plt.xticks([])
plt.yticks([])
plt.imshow(dst);

We can also transform source pixel locations $(x,y)$ as needed when performing sampling. The following function transforms source pixel locations $(x,y)$ with a 3-by-3 matrix $M$.
def setup_sampling_locs(I, dst, region=None, M=np.eye(3)):
h, w = dst.shape[0], dst.shape[1]
if region == None:
y_src = np.linspace(0, I.shape[0], h)
x_src = np.linspace(0, I.shape[1], w)
else:
y_src = np.linspace(region[0], region[1], h)
x_src = np.linspace(region[2], region[3], w)
yy_src, xx_src = np.meshgrid(y_src, x_src)
pts_src = np.vstack((xx_src.flatten(), yy_src.flatten(), np.ones(h*w))) # Homogeneous coordinates
pts_transformed = np.dot(M, pts_src - np.mean(pts_src,1).reshape(3,1)) + np.mean(pts_src, 1).reshape((3,1))
pts_transformed[0,:] = pts_transformed[0,:] / pts_transformed[2,:] # Homoegeneous divide
pts_transformed[1,:] = pts_transformed[1,:] / pts_transformed[2,:]
y_dst = np.arange(0, h)
x_dst = np.arange(0, w)
yy_dst, xx_dst = np.meshgrid(y_dst, x_dst)
return lambda: zip(pts_transformed[1,:], pts_transformed[0,:], yy_dst.flatten().astype('uint'), xx_dst.flatten().astype('uint'))
A little helper function to help visualize the sampled locations in the source image.
def get_cmap(n, name='hsv'):
'''Returns a function that maps each index
in 0, 1, ..., n-1 to a distinct RGB color.
The keyword argument name must be a standard
mpl colormap name.'''
return plt.get_cmap(name, n)
Visualizing sampling locations¶
The following figure illustrates the sampling procdure. Figure on the right is the source image. Sampled locations that make up the pixels of the destination image are overlayed on the source image.
cmap = get_cmap(h*w)
locs = setup_sampling_locs(I, dst)
sample(I, dst, locs())
plt.figure(figsize=(15,7.5))
plt.subplot(121)
plt.xticks([])
plt.yticks([])
plt.imshow(dst)
plt.subplot(122)
plt.xticks([])
plt.yticks([])
plt.imshow(I)
for i, (y_src, x_src, _, _) in enumerate(locs()):
plt.scatter(x_src, y_src, color=cmap(i))

Sampling over a subregion¶
We can also specify a subregion in the source image to sample from.
cmap = get_cmap(h*w)
locs = setup_sampling_locs(I, dst, region=[160, 230, 200, 270])
sample(I, dst, locs())
plt.figure(figsize=(15,7.5))
plt.subplot(121)
plt.xticks([])
plt.yticks([])
plt.imshow(dst)
plt.subplot(122)
plt.xticks([])
plt.yticks([])
plt.imshow(I)
for i, (y_src, x_src, _, _) in enumerate(locs()):
plt.scatter(x_src, y_src, color=cmap(i))

Transforming the sampling locations (rotation, translation, scale)¶
Lets rotate the sampling locations, and see what we get
$$ R = \left[ \begin{array}{cc} \cos \theta & - \sin \theta \\ \sin \theta & \cos \theta \end{array} \right] $$
Matrix $R$ represent counter-clockwise rotation in the $xy$-plane.
def rot2d(theta_degrees):
theta = np.pi * theta_degrees / 180.0
r = np.eye(3)
r[0][0] = np.cos(theta)
r[0][1] = - np.sin(theta)
r[1][0] = np.sin(theta)
r[1][1] = np.cos(theta)
return r
Note that our $y$ axis is facing downwards. So the rotation appears to be clockwise, while actually it is counter-clockwise.
cmap = get_cmap(h*w)
locs = setup_sampling_locs(I, dst, region=[160, 230, 200, 270], M=rot2d(45))
sample(I, dst, locs())
plt.figure(figsize=(15,7.5))
plt.subplot(121)
plt.xticks([])
plt.yticks([])
plt.imshow(dst)
plt.subplot(122)
plt.xticks([])
plt.yticks([])
plt.imshow(I)
for i, (y_src, x_src, _, _) in enumerate(locs()):
plt.scatter(x_src, y_src, color=cmap(i))

M = np.eye(3)
M[0,0] = 1.5
M[0,1] = .5
M[1,1] = -2
M[0,1] = 1.2
cmap = get_cmap(h*w)
locs = setup_sampling_locs(I, dst, region=[160, 230, 200, 270], M=M)
sample(I, dst, locs())
plt.figure(figsize=(15,7.5))
plt.subplot(121)
plt.xticks([])
plt.yticks([])
plt.imshow(dst)
plt.subplot(122)
plt.xticks([])
plt.yticks([])
plt.imshow(I)
for i, (y_src, x_src, _, _) in enumerate(locs()):
plt.scatter(x_src, y_src, color=cmap(i))

Use OpenCV method imwrite to save images to files. Remember to convert the image into BGR format first, however.
Image save demonstration¶
#dst = cv.cvtColor(dst, cv.COLOR_RGB2BGR)
#cv.imwrite('foo.png', dst)
Bilinear filtering¶
Bilinear filtering (interpolation) is an extension of linear interpolation for interpolating functions of two variables on a rectilinear 2D grid.
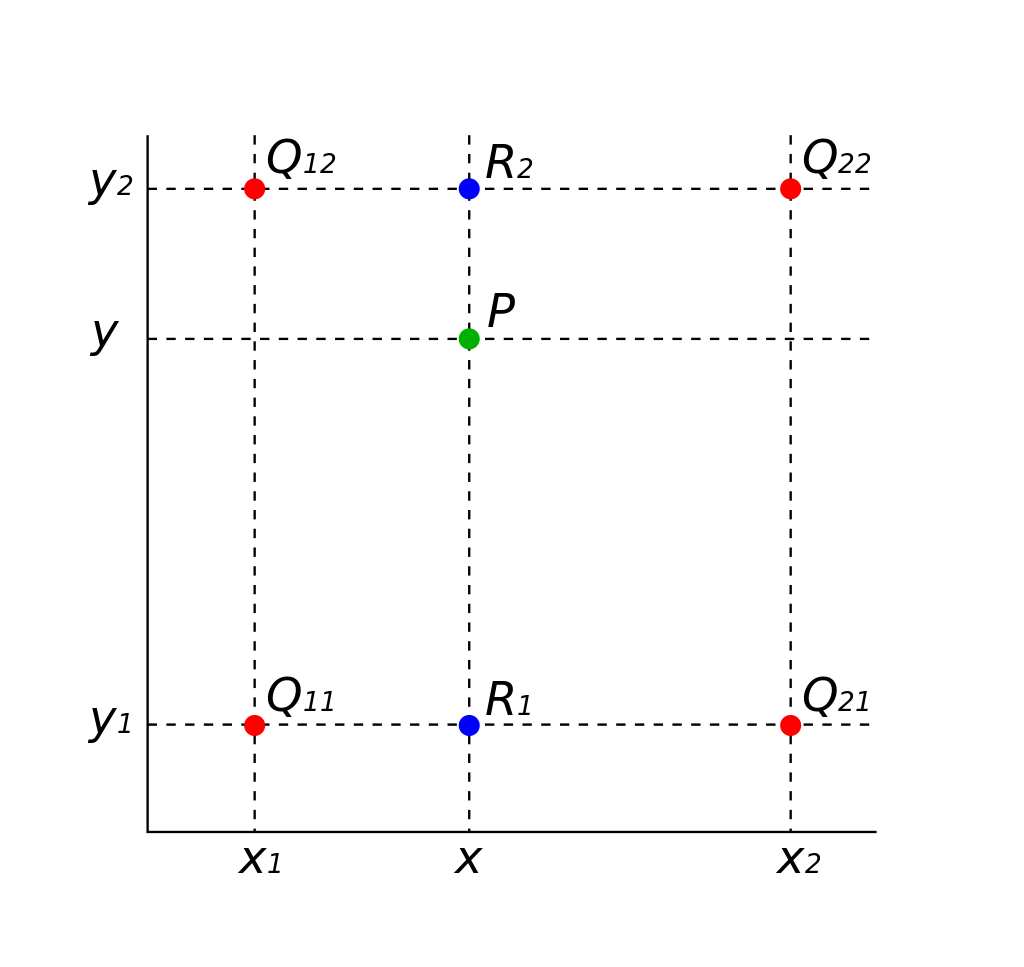
(Figure from Wikipedia)
Value of function $f$ at location $(x,y)$¶
Given value of $f$ at the following four locations:
- $(x_1,y_1) = Q_{11}$
- $(x_1,y_2) = Q_{12}$
- $(x_2,y_1) = Q_{21}$
- $(x_2,y_2) = Q_{22}$
First interpolate along $x$ direction:
$$ \begin{align} f(x,y_1) & \approx \frac{1}{(x_2 - x_1)} \left[ (x_2 - x) f(Q_{11}) + (x - x_1) f(Q_{21}) \right] \\ f(x,y_2) & \approx \frac{1}{(x_2 - x_1)} \left[ (x_2 - x) f(Q_{21}) + (x - x_1) f(Q_{22}) \right] \end{align} $$
and next interpolate along $y$.
$$ f(x,y) \approx \frac{1}{(y_2 - y_1)} \left[ (y_2 - y) f(x,y_1) + (y - y_1) f(x,y_2) \right] $$
Substituting values for $f(x,y_1)$ and $f(x,y_2)$, we get
$$ f(x,y) = \frac{1}{(x_2-x_1)(y_2-y_1)} \left[ \begin{array}{cc} x_2-x & x-x_1 \end{array} \right] \left[ \begin{array}{cc} f(Q_{11}) & f(Q_{12}) \\ f(Q_{21}) & f(Q_{22}) \end{array} \right] \left[ \begin{array}{c} y_2-y \\ y-y_1 \end{array} \right] $$
Unit square¶
If we choose a coordinate system in which the four points where $f$ is known are $(0, 0)$, $(1, 0)$, $(0, 1)$, and $(1, 1)$, then the interpolation formula simplifies to
$$ f(x,y) = \left[ \begin{array}{cc} 1-x & x \end{array} \right] \left[ \begin{array}{cc} f(0,0) & f(0,1) \\ f(1,0) & f(1,1) \end{array} \right] \left[ \begin{array}{c} 1-y \\ y \end{array} \right] $$
An alternate representation¶
For bilinear filtering, we can also write function $f$ as linear in $x$ and $y$:
$$ f(x,y) \approx a_0 + a_1 x + a_2 y + a_3 x y $$
Then all we need is to estimate the coefficients: $(a_0, a_1, a_2, a_3)$.
Exercise 1¶
Given value of function $f$ at locations
- $(x_1,y_1) = Q_{11}$
- $(x_1,y_2) = Q_{12}$
- $(x_2,y_1) = Q_{21}$
- $(x_2,y_2) = Q_{22}$
Devise a scheme to estimate coefficients needed for bilinear filtering.
Solution¶
The coefficients needed for bilinear filtering can be estimated using the following system of linear equations
$$ \left[ \begin{array}{cccc} 1 & x_1 & y_1 & x_1 y_1 \\ 1 & x_1 & y_2 & x_1 y_2 \\ 1 & x_2 & y_1 & x_2 y_1 \\ 1 & x_2 & y_2 & x_2 y_2 \end{array} \right] \left( \begin{array}{c} a_0 \\ a_1 \\ a_2 \\ a_3 \end{array} \right) = \left( \begin{array}{c} f(Q_{11})\\ f(Q_{12}) \\ f(Q_{21}) \\ f(Q_{22}) \end{array} \right) $$
(From solutions/image-sampling/solution-01.mdsolutions/image-sampling/solution-01.md)
Other options for image interpolation¶
Nearest Neighbour Interpolation¶
Nearest neighbour interpolation on the square $[0,4] \times [0,4]$ consisting of $25$ unit squares patched together. Colour indicates function value. The black dots are the locations of the prescribed data being interpolated.
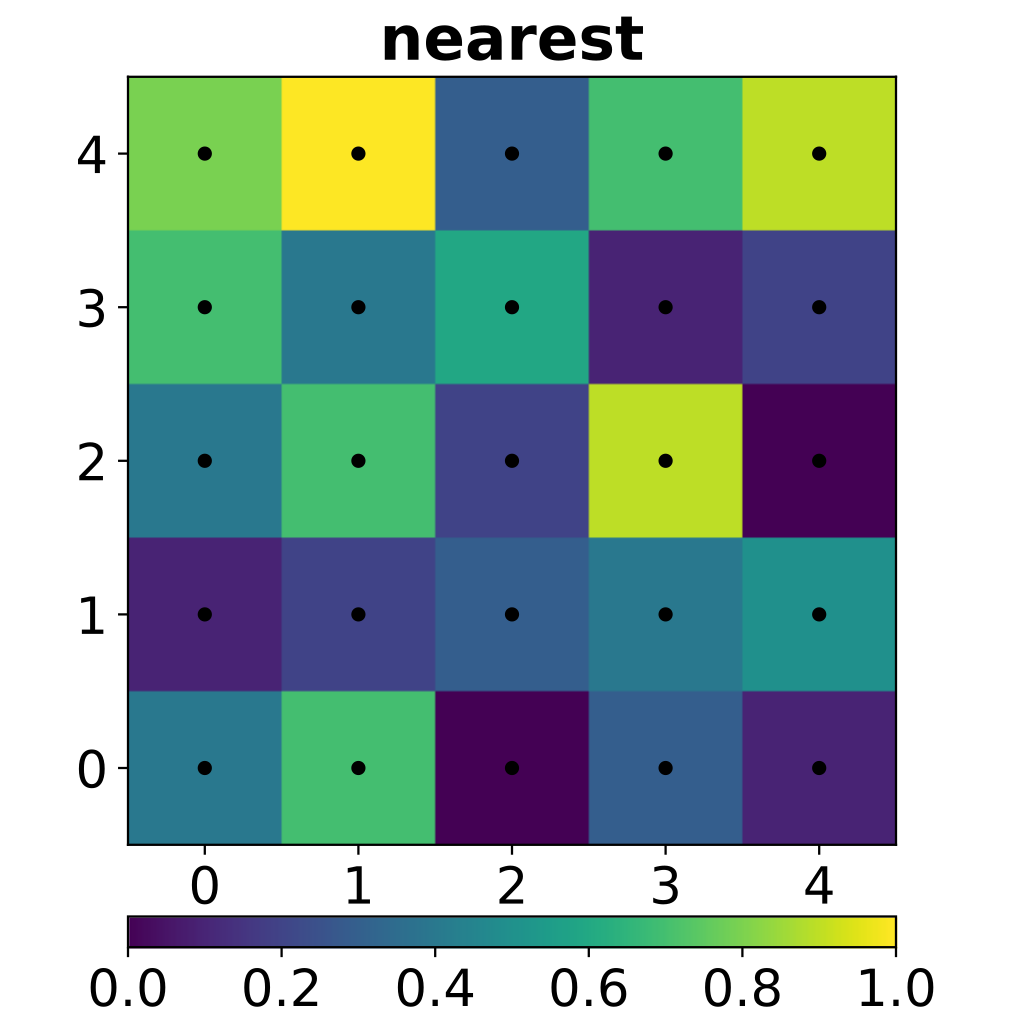
(Figure from Wikipedia)
Bicubic interpolation¶
Bicubic interpolation on the same dataset as above. Note how the color samples are not radially symmetric.
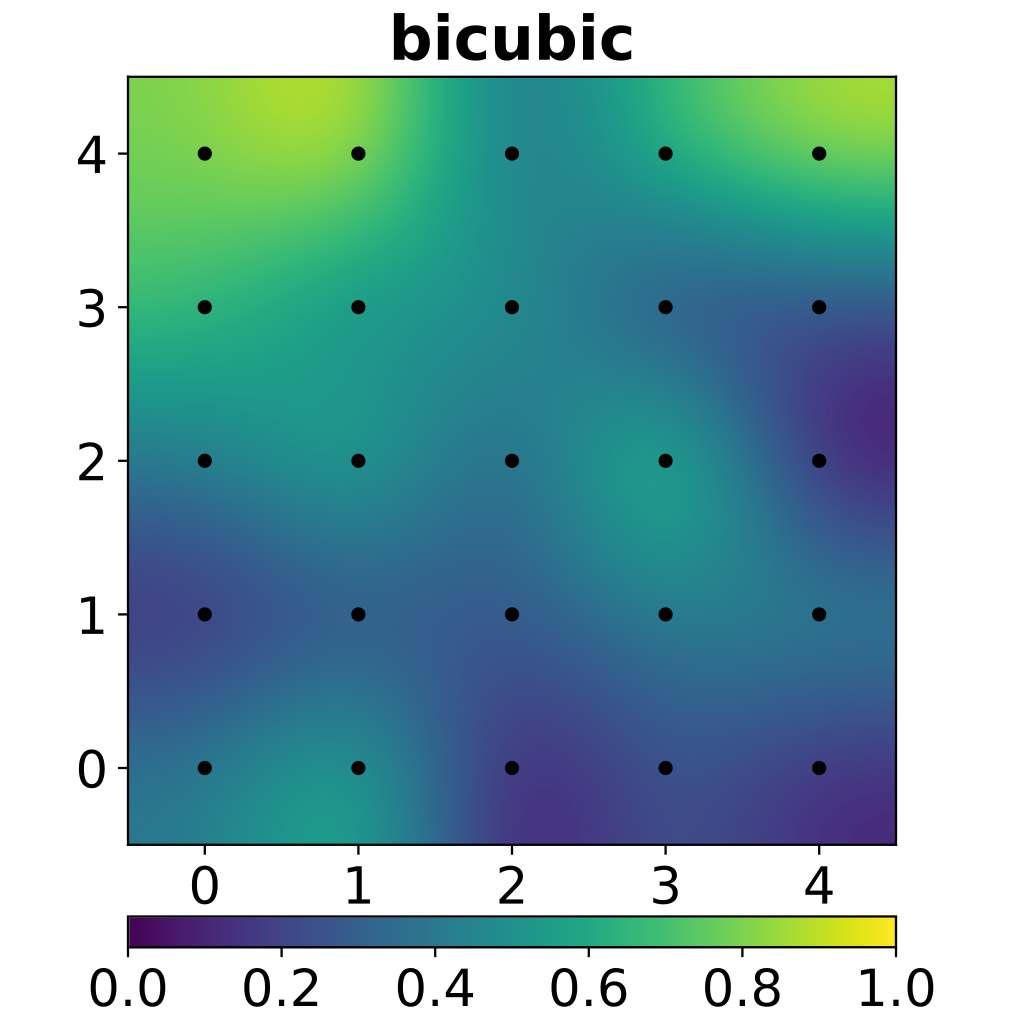
(Figure from Wikipedia)
You can estimate the coefficients needed for bicubic interpolation by exploiting the following equation
$$ f(x,y) = \sum_{i=0}^3 \sum_{j=0}^3 a_{ij} x^i y^i $$
Hint use the alternate method discussed above.
Bilinear interpolation - comparison¶
Bilinear interpolation on the same dataset as above. Derivatives of the surface are not continuous over the square boundaries.
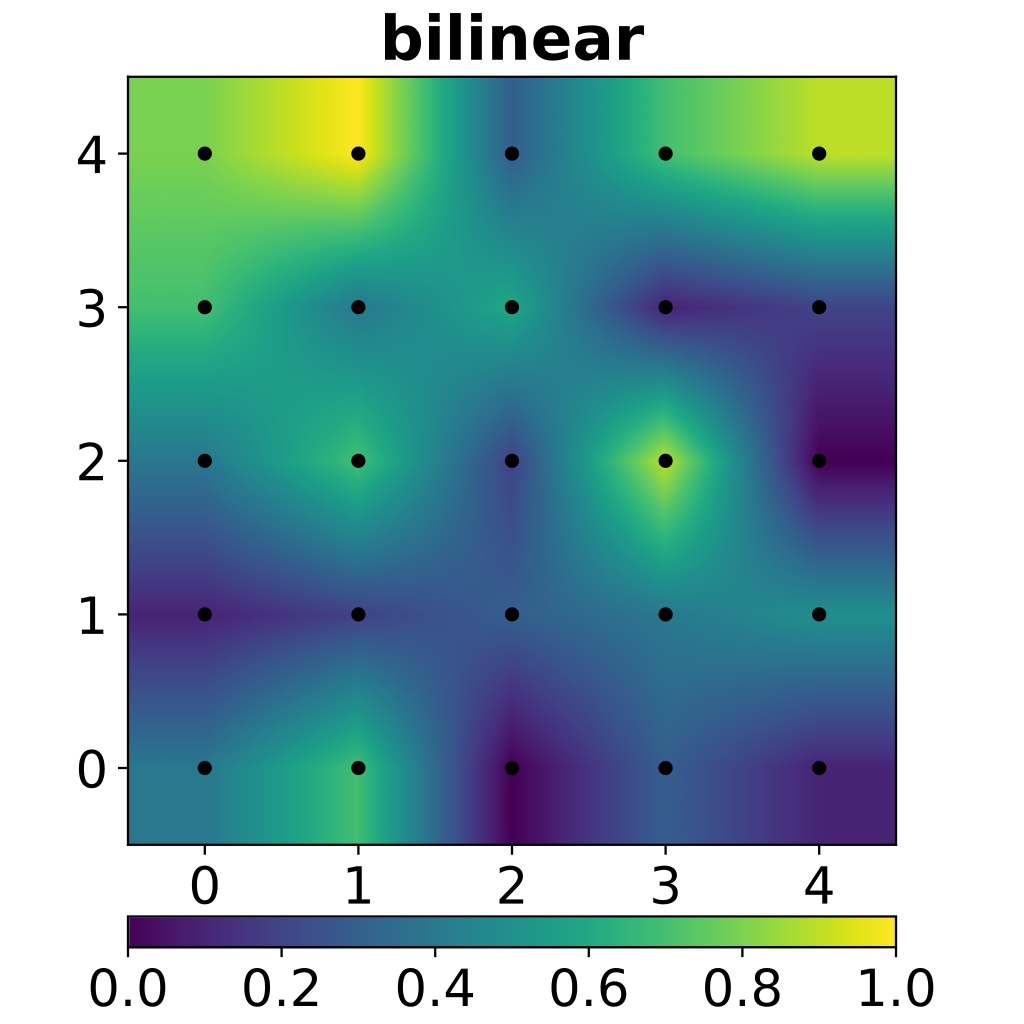
(Figure from Wikipedia)